参考にしたREWの情報の抜粋です。理解が不十分なので、間違いがあるかも知れません。よって、正しい情報を知りたい方は、下記のリンク先の情報を見てください。
REWのHelpの一部をGoogle翻訳で日本語に変換してみました。一部Google翻訳結果を修正していますが、理解が不十分なので、訳が間違っているかも知れません。
原本は、https://www.roomeqwizard.com/REWhelp.pdfです。
著作権は「Copyright (c) 2004-2018 John Mulcahy All Rights Reserved」です。
- How REW makes its measurements (REW V5.19 Help P.5)
- REWは、対数正弦スイープ測定法を使用します。SWEN MULLER氏とPAULO MASSARANI氏の「Transfer Function Measurement with Sweeps」を読むことにより、対数正弦スイープ法と色々な他の方法を知ることができます。しかし、ここで基本的な説明をします。わからない場合は、ここの説明を飛ばしても良いです。
- 測定を行うには、音源(スピーカーまたはサブウーファー)とマイクが必要です(SPLメーターにはマイクが含まれており、マイクの代わりに多くを使用できます)。 対数スイープ信号が音源に送信されます。それは、低周波数で始まり、周波数が高周波数に向かって増加するトーンです。対数スイープは、周波数が変化する速度、2倍になるまでの時間を一定にしたものです(たとえば、スイープが20から40 Hzになるまでの時間は、40から80 Hzになるまでの時間と同じです)。マイクはスイープを拾い、音源から直接伝わる音だけでなく、最初に部屋の表面で跳ね返って伝わる音も聞きます。
- マイクが拾った音をキャプチャすると、分析が始まります。「高速フーリエ変換」(FFT)と呼ばれるプロセスを使用して、ソース(そのスペクトル)に送信したスイープを構成する個々の周波数(振幅と位相)を計算します。同じプロセスで、マイクが拾った信号の周波数の振幅と位相が計算されます。マイクが見た信号の振幅と位相をスイープに含まれる信号と比較することで、測定している部屋によって各周波数がどのように影響を受けたかを把握できます。これは、音源の位置からマイクの位置への部屋の「伝達関数」と呼ばれます。異なる音源位置または異なるマイク位置では異なる伝達関数が存在することに注意してください。測定は1つに対してのみ有効です。特定のソースとマイクの位置。伝達関数を作成したら、「逆FFT」を使用して、周波数の振幅と位相の情報から、ソースからマイクに移動するときに信号がどのように変化するかを表す時間信号に変換できます。その時間軸の信号は「インパルス応答」と呼ばれます。-伝達関数と同様に、それは1つの特定のソースとマイク位置に対してのみ有効です。
- インパルス応答は、実際には、ソース位置で非常に短いが大きなクリック音を発し、その後マイクが拾ったものを記録できる場合に見られる信号とまったく同じです(「非常に短い」とは、サンプルで1サンプルの時間だけ続くことを意味します)。分析に使用しているレートであるため、48kHzのサンプルレートの場合、1/48,000秒(2,100万分の1秒)になります。なぜクリックだけを使わないのかと疑問に思われるかもしれません。1つの問題は、クリックが非常に短いため、部屋のバックグラウンドノイズがある状態で、最初にクリックした後に何が起こるかを把握できるようにするには、クリックを非常に大きくする必要があることです。スピーカーを使用してそれを生成することはできません。スターターピストルのようなものが必要になるか、風船を破裂させる必要があります。また、非常に大きなクリック音自体と、部屋で発生するクリック音のはるかに小さな反射音の両方に対応できるマイクも必要です。家族や隣人は、あなたがピストルを繰り返し発射して部屋でしていることを理解することはないでしょう。そして彼らがそれを我慢したとしても、測定結果はスイープを使うほど良くないでしょう。技術的には、スイープ法によってはるかに高い信号対雑音(S/N)比を達成できます。 S/Nは、バックグラウンドノイズレベルと、テスト信号に含まれるエネルギー量によって決まります。これは、信号の音量と持続時間によって異なります。インパルスは非常に短く、数百万分の1秒であるため、大きなエネルギーを得るには、非常に大きな音が必要です。スイープは数秒間続くため、適度なボリュームでも、その総エネルギーはインパルスの100万倍にも達する可能性があります。
- インパルス応答が取得されると、それを分析して、部屋の動作に関する情報を計算できます。最も単純な分析はFFTで、ソースとマイクの位置の間の周波数応答を示します。しかし、それをいくつか加工して見ることができます。インパルス応答のどの部分がFFTによって分析されるかを変更すると、部屋の応答のどの側面が表示されるかが変わります。インパルス応答の初期部分は、音源からマイクへの直接音、つまりそれらの間の最短経路に対応します。部屋の表面で跳ね返った音は、マイクに到達するためにさらに移動する必要がありますが、これには時間がかかるため、インパルス応答の後半部分には部屋の寄与が含まれます。インパルス応答を「ウィンドウ処理」して最初の部分だけを見ると、部屋からの寄与が殆どまたは全く無い直接音の周波数応答が分かります。応答の後半部分を含むウィンドウでは、部屋の影響で周波数応答をどのように変化するのかを確認できます。直接音と後の(反射)音の寄与を分離する機能は、インパルス応答から得られる周波数応答と、たとえばソースと部屋の合計応答のみを表示できるRTAから得られる周波数応答との重要な違いです。
- インパルス応答から取得できるその他の情報には、応答に沿って段階的にウィンドウを移動し、応答が時間の経過とともに変化する方法の3D画像を生成するためにさまざまな周波数応答をプロットすることによって生成される、「waterfall」プロットが含まれます。 部屋の「RT60」データは、さまざまな周波数帯域の音が60dB減衰する(1/1000になる)のにかかる時間です。
- Connections (REW V5.19 Help P.7)
- SPLメーター(騒音計)使用時の測定の全体的な設定を以下に示します。 USBマイクを使用している場合は、サウンドカード入力に接続する必要はありません。マイクをコンピューターのUSBポートに接続するだけです。

- USBマイクを使用しない場合、サウンドカードの入力チャネルの1つを使用して、マイクまたはメーターからの音圧信号を測定します。これは、メーターまたはマイクプリアンプのアナログ出力に接続する必要があります。 デフォルトでは右入力を使用しますが、どちらの入力も使用できます。 サウンドカード設定のコントロールは、どの入力を使うかをREWに指示します。
- サウンドカードの出力チャンネルの1つ(通常は右)は、AVプロセッサの入力チャンネルまたはイコライザーの入力に接続する必要があります。 AVプロセッサに接続すると、メインスピーカーとサブウーファーの応答を示す測定を行ったり、サブウーファーとメインスピーカーの統合を確認したりできます。 AVプロセッサの低音管理の効果を測定に含めることができます。 アナログ入力の左または右チャンネルに接続すると、対応するメインスピーカーとサブウーファーの応答を測定できます。メインスピーカーまたはサブをオフにするか切断して、測定から除外します。 コンピューターとAVプロセッサーの両方がHDMI経由のオーディオをサポートしている場合は、HDMI接続を使用してオーディオを伝送することもできます(HDMIオーディオドライバーを出力デバイスとして選択する必要があります)。
- 他の入力および出力チャネルは、基本的な測定に使用する必要はありません。サウンドカード自体の応答は、出力を入力に直接接続して参照測定を行い、REWを構成して、後続の部屋の測定からその測定された応答を差し引くことで補正できます。ただし、サウンドカードの他の出力から他の入力へのループバック接続をREWのタイミング基準として使用して、測定時にサウンドカードとオペレーティングシステムの時間遅延を自動的に補正することもできます。測定間の位相または時間遅延を比較したり、マルチチャネルシステムでスピーカー遅延設定を正しく取得したりするには、タイミングリファレンスが必要です。これを行いたい場合は、ループバック接続を行うために追加のRCAフォノプラグカプラーが必要になる場合があります。 REWが1つのチャネルをタイミング基準として使用するかどうかは、分析設定での選択によって制御されます。入力がサウンドカードではなくUSBマイクを介している場合は、音響タイミング基準を使用できます。音響タイミング基準が使用される場合、REWは、測定対象のチャネルで測定スイープを生成する前に、基準として機能するように選択された出力にタイミング信号を生成します。タイミング信号は正確なタイミングを可能にする高周波掃引であり、サブウーファーを基準チャンネルとして使用することはできません。測定には、基準スピーカーの距離と比較したマイクからの距離の差に対応する時間遅延があります。基準スピーカーがさらに離れている場合、遅延は負になります。複数のスイープは、音響タイミング基準では使用できないことに注意してください。
- Equaliser Connections (REW V5.19 Help P.8)
- イコライザー(BFD Pro DSP1124PやFBQ2496など)を使用してサブウーファーの応答を最適化する場合は、AVプロセッサーのLFE/Sub出力とサブウーファーの低レベル入力の間に接続する必要があります。 BFD Proの場合、背面パネルの操作レベルスイッチを押して-10dBVレンジを選択する必要があります。

- Viewing Signals (REW V5.19 Help P.10)
- 信号を確認する1つの方法は、測定値を時間に対してプロットすることです。キャプチャされた信号がスコープグラフのREWにプロットされると、%FSとして表示されます。100%FSに達する信号は、サウンドカードがキャプチャできる最大の信号です。REWスコーププロットの例を以下に示します。REWが生成したスイープ信号と、マイクからキャプチャされた結果の信号(赤)が表示されています。

- 私たちは通常、サンプル値以上のものに関心があります。信号を構成する周波数も重要な場合があります。信号を構成する周波数の範囲はそのスペクトルと呼ばれ、高速フーリエ変換またはFFTを使用して計算できます。FFTは、複数のコサイン波の振幅と位相を計算します。これらを合計すると、時間軸の信号と同じ測定値の信号が得られます。これらのコサイン波の振幅と位相は、個々の測定値ではなく、時間軸の信号を構成する周波数の観点から、時間軸の信号を表す別の方法です。振幅は理解しやすく、振幅が大きいほコサイン波が大きくなります。位相は、測定されたシーケンスの最初のサンプルの時点でのコサイン波の開始値を示します。ゼロ度の位相は、開始値が振幅*cos(0)=振幅であることを意味します。90度の位相は、振幅*cos(90)=0の開始値を意味します。位相よりも振幅に関心があることがよくありますが、位相について完全に忘れてはなりません。位相は、元の時間軸の信号の形状の半分の情報を含んでいます。
- Systems and Transfer Functions (REW V5.19 Help P.11)
- 信号のスペクトルを表示することには用途がありますが、使用する機器が信号のスペクトルをどのように変化させるのかも関心があります。システムが通過する信号のスペクトルを変化させる特性を、システムの伝達関数と呼びます。伝達関数は、周波数応答と位相応答の2つから構成されます。周波数応答は、システムによって周波数の振幅がどのように変化するかを示し、位相応答は、周波数の位相がどのように変化するかを示します。システムの完全な説明には両方の応答が必要です。非常に異なるシステムでも同じ周波数応答を持つことができますが、位相応答が異なるため、それらを区別できます。
- システムの周波数応答をシステムの出力のスペクトルと混同しないことが重要であることに注意してください。信号のスペクトルは、信号に含まれる周波数の観点から、その信号が何で構成されているかを示します。一方、伝達関数の周波数応答は、システムが信号のスペクトルをどのように変化させるかを示します。REWのような測定ソフトウェアの目的は伝達関数を測定することであり、REWのSPL&位相グラフは伝達関数の周波数と位相応答を示します。周波数応答の振幅は、SPLトレースとして表示されます。以下は、200Hzまでのスパンを示す、部屋の測定からの周波数応答(上のトレース、左側の軸)と位相応答(下部のトレース、右側の軸)のプロットです。

- The Impulse Response (REW V5.19 Help P.12)
- 伝達関数は、周波数と位相の応答を通じて、システムが通過する信号のスペクトルにどのように影響するかを示します。これは、いわゆる周波数領域でシステムを特徴づけます。しかし、信号自体はどうですか?信号の個々のサンプルがシステムによってどのように変化するか、その時間領域の動作をどのように説明しますか?システムが信号のサンプルを変化させる方法は、そのインパルス応答と呼ばれます。これから名前の理由を説明します。インパルス応答(IR)はそれ自体が信号であり、一連のサンプルで構成されます。システムに入力された信号は、通過するときにIRと重なり、サンプルごとにIRに沿ってスライドします。信号が最初に現れるとき、その最初のサンプルはインパルス応答の最初のサンプルと整列します。その最初の入力サンプルのシステム出力は、最初のIRサンプル値に最初の信号サンプル値を掛けたものです。
- output[1] = input[1]*IR[1]
- 1サンプル間隔後、入力にはIRとの2サンプルのオーバーラップがあります。この期間の出力は、2番目の入力サンプルに最初のIRサンプルを掛けたものに、最初の入力サンプルに2番目のIRサンプルを掛けたものです。
- output[2] = input[2]*IR[1] + input[1]*IR[2]
- 別のサンプル期間後、入力はIRと3サンプルオーバーラップし、出力は
output[3] = input[3]*IR[1] + input[2]*IR[2] + input[1]*IR[3]
になります。 - そして、連続する各入力サンプルが表示されるたびに、それが続きます。入力信号サンプルにIRサンプルを乗算するプロセスはconvolution(畳み込み)と呼ばれます。通常、インパルス応答の持続時間はかなり短く、機器の測定では1秒未満、家庭の大きさの部屋の測定では1~2秒です。最終的に、各期間の出力は、IRの長さに入力信号の同じ長さを掛けたもので構成され、すべての個々の積が合計されて、その期間の出力が得られます。
- So why call it "impulse response"? (REW V5.19 Help P.12)
- 入力信号がフルスケールの単一のサンプルで構成されていて、それに値1を割り当て、その後に他のすべてのサンプルにゼロを割り当てる場合、どのような出力が得られますか?初期出力サンプルは次のようになります。
output[1] = input[1]*IR[1] = IR[1] - 次の出力サンプルは
output[2] = input[2]*IR[1] + input[1]*IR[2] = 0*IR[1]+1*IR[2] = IR[2] - 3番目のサンプルは
output[3] = input[3]*IR[1] + input[2]*IR[2] + input[1]*IR[3] = 0*IR[1] + 0*IR[2] + 1*IR[3] = IR[3] - と続きます。出力は、順番にIRの各サンプルで構成されます。フルスケールサンプルが1つだけで、その後にゼロが続く入力はインパルスと呼ばれるため、その入力が供給されたときのシステムの出力はインパルス応答と呼ばれます。
- Relationship between Transfer Function and Impulse Response (REW V5.19 Help P.13)
- 伝達関数とインパルス応答はどちらも同じシステムの記述であるため、これらは関連していると想像できると思います。伝達関数はインパルス応答のFFTであり、インパルス応答は伝達関数の逆FFTです。これらは両方とも同じシステムの表現であり、一方は周波数領域にあり、もう一方は時間領域にあります。伝達関数は、単にインパルス応答のスペクトルです。
- Windowing the Impulse Response (REW V5.19 Help P.14)
- 測定したいシステムはスピーカーのような機器かもしれませんが、音響学では、実際に測定しているシステムには、測定用に生成された信号と分析用にピックアップされた信号の間のパスに他の機器や環境が含まれます。これらには、アンプ、マイク、サウンドカード、そして最も重要なのは部屋自体が含まれます。私たちが実際に測定しているシステムにはこれらすべての要素が含まれているため、その一部に焦点を当てるには、関心のない部分の影響を取り除く方法が必要になります。
- サウンドカードの応答は、マイクの応答と同様に、個別に測定することで調整できます。部屋の効果を取り除くことはより困難です。特にリスニングポジションで聞いていることを研究している場合は、部屋の影響が私たちの興味を引くかもしれませんが、スピーカーのパフォーマンスを分離しようとすると、部屋の寄与によってスピーカーのパフォーマンスの詳細が不明瞭になる可能性があります。
- マイクに到達する信号は、スピーカーからの最短ルートであるダイレクトパスに沿って移動するため、最短の時間がかかります。スピーカーからの音も外側に放射され、部屋の表面で跳ね返ります。これらの表面からの反射は、マイクに到達する前にさらに移動するため、到達するまでに時間がかかります。信号がインパルスである場合、最初に直接到着し、次に反射からの到着が見られると予想されます。これらの遅い到着は、追加の距離を移動するのにかかる余分な時間によって遅れます。余分な時間が最も短いのは、音が最も近い表面に移動するのにかかる時間です。たとえば、最も近い表面が3フィート離れている場合、その表面からの反射がマイクに到達するまでに少なくとも3ミリ秒長くかかります。スピーカーからの直接音よりも(実際には、経路距離が3フィート強になるため、実際にはそれより少し長くかかります)。
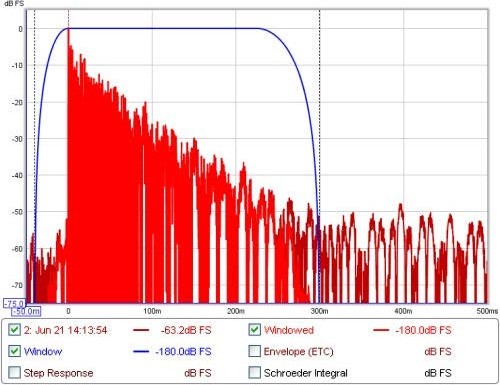
- インパルス応答の最初の数ミリ秒だけを調べると、最初の到着に対応する部分が表示されます。これは、部屋からの寄与なしにスピーカーから直接来たものです。このようにインパルス応答のごく一部を見ることを、応答のウィンドウ処理と呼びます(インパルス応答画像では、青いトレースがウィンドウを示しています)。IRのウィンドウ部分のFFTを計算すると、その直接到着の伝達関数を確認できます。これは、スピーカーのみの伝達関数になります。ただし、欠点があります。短い信号のFFTを取得すると、信号の長さに依存する限界までの応答しか確認できません。1秒の信号があれば、1Hzまで下がる周波数応答を得ることができます。1/10秒しかない場合、10Hzまで下がる周波数応答しか得られません。一般に、分析する信号の長さがT秒の場合、最低周波数は1/Tです。したがって、ウィンドウの長さが3msしかない場合、周波数応答は1/0.003 = 333Hzまでしか下がりません。部屋の影響を受けない低周波数応答を確認するには、最も近い表面をできるだけ遠くに配置する必要があります。REWでウィンドウ設定を調整するには、[IR Windows]ボタンをクリックします。デフォルトでは、REWは0.5秒を超えるインパルス応答を含むウィンドウ設定を使用するため、部屋の効果を確認できます。
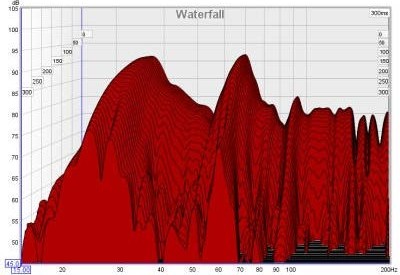
- Waterfalls (REW V5.19 Help P.15)
- SPL&PhaseおよびImpulseグラフは、キャプチャした伝達関数を調べるのに最も役立ちますが、部屋で再生する音に対して部屋が与える影響についての有用な情報を提供する別のグラフがあります。そのグラフがウォーターフォールです。ウォーターフォールは、時間の経過とともにインパルス応答のセクションのスペクトルがどのように変化するかをプロットしたものです。これは、応答の最初の部分(通常、部屋の応答を見ると数百ミリ秒)をウィンドウ処理し、そのウィンドウ処理されたセクションのFFTを計算することによって生成されます。FFTは、滝の最初のスライスを生成します。次に、インパルス応答に沿ってウィンドウを少し移動し、別のFFTを計算して、ウォーターフォールの2番目のスライスを生成します。ウィンドウをもう少し動かすと、3番目のスライスが得られ、次に4番目のスライスが得られます。滝に沿ってさらに移動すると、スピーカーからの最初の寄与が失われ始め、部屋の寄与だけがますます見られます。部屋の応答は、モーダルレゾナンスが存在する周波数で最も強くなります。モーダルレゾナンスは、部屋の表面間を行き来する音がそれ自体を強化して、安定したゆっくりと減衰するトーンを生成する周波数です。これらの周波数は、ウォーターフォールプロットの尾根として際立っており、最悪のモーダル共振は、減衰に最も時間がかかる最も高い尾根を持っています。
- Impulse Responses (REW V5.19 Help P.54)
- インパルス応答の解釈は、音響解析の重要な部分です。 インパルス応答測定は、部屋とその中で音が再生される方法について多くのことを教えてくれます。 どのような処置方法が役立つか、そして最良の結果を達成するために処置方法が正しく適用されているかどうかを示すことができます。 このページでは、インパルス応答、それらから抽出できる情報、およびREWがそのような応答を測定および分析する方法について説明します。
- What is an impulse response? (REW Help P.54)
- インパルス応答の解釈に取り掛かる前に、インパルス応答とは何かを理解する必要があります。インパルス応答は、本質的に、ピストルショットの破裂音のような、非常に大きな、非常に短いクリックを再生した場合に部屋でどのように聞こえるかを記録したものです。インパルス応答を測定する理由(部屋で銃を発射するよりも繊細な方法で)は、測定されたスピーカーと測定マイクが置かれた部屋で構成されるシステムの動作を完全に特徴付けるためです。インパルスの重要な特性は、直感的には明らかではありませんが、個々の正弦波に分割すると、同じ振幅のすべての周波数が含まれていることがわかります。不思議ですが本当です。これは、インパルス応答を構成する周波数成分を特定することにより、システムの周波数応答を計算できることを意味します。 REWは、インパルス応答をフーリエ変換することでこれを行います。これにより、本質的に、インパルス応答が個々の周波数成分に分割されます。これらの周波数成分のそれぞれの大きさのプロットは、システムの周波数応答です。
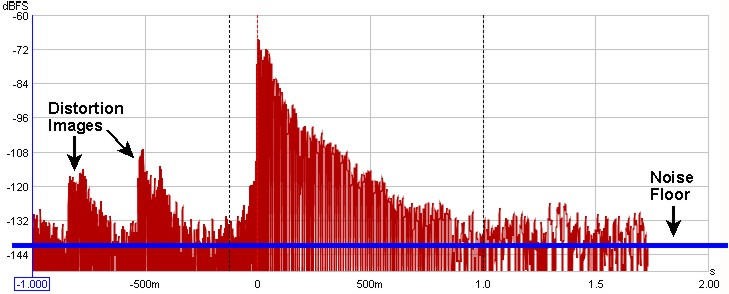
- インパルス応答が対数スイープ正弦波によって測定される場合、部屋の線形応答はその非線形応答から都合よく分離されます。 時刻= 0の最初のピークの前の応答の部分は、実際にはシステムの歪みによるものです。- よく見ると、そこにメインインパルス応答の縮小された水平方向に圧縮されたコピーがあります。- これらのコピーのそれぞれは歪み高調波によるものです。 時間が更に負になるにつれて、最初に2次高調波、次に3次、次に4次となります。 time = 0後の最初のピークとその後の減衰は、歪みのないシステムの応答です。
- 完全に吸収性の境界を持つ無限帯域幅の完全なシステムでは、インパルス応答は時間0での単一のスパイクのように見え、他には何もありません。それに最も近いのは、サウンドカードのループバック応答を測定することです。 実際のシステムでは、有限の帯域幅が応答を広げます(帯域幅が非常に限られているため、サブウーファーを測定する場合は劇的にそうなります)。 部屋の境界からの反射は、マイクに到達するために必要な距離に対応する時間後に初期応答に追加されます。-たとえば、マイクがスピーカーから10フィート離れていて、壁からの音の反射が15フィート移動しなければならなかった場合 マイクに到達するまでのフィート数では、音がその余分な5フィートを移動するのに約5ミリ秒かかるため、その反射は最初のピークから約5ミリ秒後のスパイク(反射の性質に応じて塗りつぶされます)を与えます。
- (サブウーファーの応答ではなく)スピーカーからのフルレンジの応答を測定する場合、フルレンジシステムの帯域幅が広いとインパルス(および反射)のスパイクが非常に狭くなるため、反射を見つけやすくなりますが、それらを見るための時間軸をズームする必要があります。 線形Y軸(dBFSではなく%FSに設定)を使用すると簡単に見つけることができ、ETC平滑化を0に設定するとより読みやすく表示されます。
- Minimum Phase (REW V5.19 Help P.57)
- イコライゼーション、特に部屋の音響応答を改善するために適用されるイコライゼーションの議論では、「最小位相」がしばしば発生します。- 一般に、EQを使用して応答の問題に対処できるかどうかという文脈で。 では、「最小フェーズ」とは何ですか。なぜ気にする必要があるのでしょうか。
- 最小位相システムを構成するものについては、厳密な数学的およびシステム理論の定義がありますが、ここでは繰り返しません。音響測定のコンテキストでは、最小位相のシステムには2つの重要な特性があります。それは、通過する信号の時間遅延が最小であり、反転できることです。
- Impulse Response Windows (REW V5.19 Help P.55)
- スイープをキャプチャした後、FFT処理を実行して、システムのインパルス応答と対応する周波数応答を導き出します。 周波数応答を導出するために使用される部分を定義する左右のウィンドウの位置と幅を調整するためのコントロールがあります。これらのコントロールには、ツールバーの[IR Windows]ボタンを押すことでアクセスできます。

- ウィンドウとそれらがカバーするインパルス応答の領域は、「Window」および「Windowed」トレースを選択することにより、インパルスグラフで表示できます。 ウィンドウの基準位置は通常、インパルスピークです。
- 通常、ウィンドウのデフォルト設定が適切です。 小さい部屋では、300~500ミリ秒程度の短い右側のウィンドウ期間を使用する必要がある場合があります。周波数応答プロットにノイズが多くギザギザに見える場合は、右側のウィンドウ期間を短くして、[ウィンドウの適用]をクリックして周波数応答を再計算してください。 非常に広い部屋では、周波数分解能を向上させるためにウィンドウを大きくすることができます。
- 現在の合計ウィンドウ期間(左と右の合計)に対応する周波数解像度が[Apply Windows]ボタンの上に表示されます。期間が長いほど、解像度が高くなります。 代替のウィンドウ形状は、左右のウィンドウに対して個別に選択できます。
- 左右のウィンドウに加えて、周波数に依存するガウスウィンドウを適用できます。 これは、幅が周波数に反比例して変化し、周波数が高くなるにつれて徐々に狭くなるウィンドウです。 ウィンドウの幅は、サイクル数またはオクターブ分数として指定できます。 幅がサイクル単位の場合、任意の周波数での幅(ウィンドウの振幅の半分のポイント間)は、サイクル数にその周波数の周期を掛けたものになります。たとえば、15サイクルのウィンドウの幅は1kHzで15 * (1/1000)= 0.015秒または15ミリ秒になります。 対応するオクターブ分数は、同じオクターブ分数のスムージングを適用するのと同様の効果がありますが、可変ウィンドウは、周波数が増加するにつれて、単に平均化するのではなく、遅れて到着する音を徐々に除外します。-これは、耳がより高い周波数でスピーカーから直接音をより拾う特性と類似しています。
- [Add frequency dependent window]が選択されている場合、選択した左右のウィンドウを最初に適用した後に、周波数依存ウィンドウが適用されます。 FDWはウィンドウ基準時間の中心にあります。最良の結果を得るには、これはインパルスのピークにある必要があります。
- Minimum Phase and Time delay (REW V5.19 Help P.57)
- 「lowest time delay」は、測定された周波数(SPL)応答を伝達している間に信号の周波数成分が遅延する量です。遅延特性は、システムの群遅延グラフで直接確認できます。測定したSPL応答だけでは、それに「minimum delay」特性があるかどうかが分かりません。音がスピーカーからマイクに伝わるのにかかる時間など、システム全体のどこかに時間遅延があった場合、その遅延はシステムをnon-minimum phase(厳密な意味で)にしますが、測定したSPL応答は変わりません。
- 時間遅延により、周波数とともに増加する位相シフトが発生します。たとえば、わずか1msの遅延では、100Hzでは36度、10kHzでは3,600度の位相シフトが発生します。これは、1msが100Hz信号の10ms周期の1/10であるためです。 ただし、10kHz信号の0.1ms周期の10倍であり、各周期は360度です。時間遅延によって引き起こされる位相シフトは周波数に対して線形です。つまり、1msの例では、100Hzで36度の位相シフトが発生し、周波数の2倍でその遅延が2倍、周波数の3倍で遅延が3倍になります。周波数軸が線形に設定されている場合、時間遅延の位相プロットは、周波数が増加するにつれて直線が下降するように見えます。どの程度急激に低下するかは、遅延の大きさによって異なります。
- 一定の時間遅延は位相応答の解釈を困難にしますが、測定から削除することができ、EQの適用に問題は発生しません。 ただし、時間遅延(またはその影響)を取り除くだけでは、システムを最小フェーズにするのに十分ではなく、それ以上のものがあります。
- Minimum Phase and Invertibility (REW V5.19 Help P.57)
- minimum phaseシステムは反転させることができます。つまり、システムに適用した場合、フラットな応答を生成し、同時に位相応答を補正するフィルターを設計できます。これは、EQを適用するかどうかを見つけるのに明らかに良い性質です。minimum phaseではないシステム、特にminimum phaseではない領域にEQを適用すると、EQは希望する結果を生成しません。フラットな応答を実現することは可能かもしれませんが、位相応答を修正することはできません。 それは不可能です。
- 応答を非minimum phaseにするものの簡単な例は、直接信号と同じかそれよりも大きい反射です(異なるが同じ長さのパスに沿った反射を組み合わせてより高いレベルを生成したり、曲面で反射の焦点を合わせることができます)。直接信号とまったく同じ振幅の反射の単純なケースでは、反射が直接音と180度位相がずれている規則的な間隔の周波数が存在することがわかります。これらの信号が合わさると、これらの周波数でゼロ振幅になります(音響測定でよく見られるコムフィルタリングの極端な例)。EQは直接信号と反射信号に等しく影響するため、信号はキャンセルされたままであるため、そのゼロレベルをEQの量によって元の状態に戻すことはできません。応答にゼロの領域がある場合、それを反転することはできず、mininum phaseではありません。反射が直接音よりも大きい場合、問題は同様にトリッキーです。ゼロレベルはもうありませんが、EQが適用する補正は、これまで以上に大きな反射に対抗するために大きくなり続ける必要があるという状況になります。 そして、すぐに限界に達します。
- Identifying Minimum Phase Regions (REW V5.19 Help P.57)
- 部屋の応答は混合位相です。つまり、minimum phase領域とminimum phaseではない領域がいくつかあります。minimum phase領域は低周波数になる傾向がありますが、特定のカットオフを下回る応答がminimum phaseであると単純に言うことはできません。特に測定に時間遅延がある場合は、ラップされた位相応答を見てminimum phase領域を特定することはできません。ラップされていない応答は、線形周波数軸に対してプロットされたいくつかの手がかりを与えますが、多くの場合、使用するのが実用的でないほど大きなスパンを占めます。測定の時間遅延を取り除いても、位相応答だけではminimum phase領域を簡単に特定することはできません。ただし、簡単な方法があります。これは、室内のサブ+メインスピーカーの測定値です。

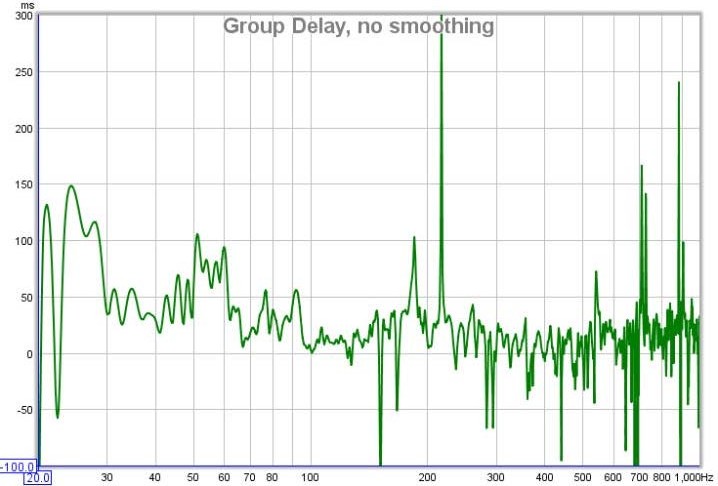
- これが主に部屋の遷移周波数より下の最小位相であり、上では非minimum phaseであると推測するのは危険ですが、推測を避けるために群遅延を調べることができます。群遅延プロットは、各周波数がどれだけ遅延しているかを示します。数学的には、ラップされていない位相プロットの傾きであるため、位相が直線的に低下する場所は、一定の群遅延領域に対応します(つまり、その領域は一定の時間だけ遅延します)。測定の群遅延プロットは次のとおりです。
- これで少し近づきます。群遅延で特に激しい変動がある場所はminimum phaseではないと推測できますが、それでもminimum phase領域を簡単に特定することはできません。これを行うには、同じ振幅応答を持つがminimum phaseであるシステムと測定を比較し、測定のexcess group delayを調べる必要があります。minimum phase応答は、測定振幅を使用し、minimum phaseシステムに当てはまる2つの間の数学的関係を使用して、測定振幅から対応するminimum phaseを計算することによって生成されます。測定された位相と最小位相(過剰位相)の差を調べ、その差の傾きを測定してexcess group delayを見つけることにより、次のプロットが得られます。

- これで、作業できるものができました。excess group delayプロットがフラットな場合は、応答のminimum phase領域です。応答がminimum phaseではない非常に低い周波数、たとえば約44~56Hzの領域があることがわかります。これらは通常、応答に急激な落ち込みがある領域に対応し、EQでそのような領域を持ち上げようとしたときによく見られる悪い結果になります。一方、低周波数のピークは通常、minimum phase領域にあり、プロットは28Hzと60Hzのピークの領域でかなり平坦であり、EQを適用する試みの前兆となります。一般に、応答のピークは、イコライゼーションによって修正可能な機能の結果です(技術的に言えば、それらは応答の極によるものであり、イコライザーは極をキャンセルするゼロを配置できます)。
- 300~500Hzなどのminimum phaseの比較的高い周波数の領域がありますが、その領域では応答が大きく変動するため、そこでEQを適用することができます。ただし、測定はそれが行われたマイクの位置に対してのみ有効であり、周波数が高くなると、マイクが動くにつれて応答がより急速に変化することを覚えておく必要があります。元の測定位置で良好なEQは、他の位置では悪い結果をもたらす可能性があるため、リスナーがどこにいるかを確認することが重要です。狭帯域幅のEQ調整は、モーダル範囲外では使用しないでください。周波数が高いほど、非常に狭い領域の外で有効な可能性に耐えるために、EQ調整を広くする必要があります。
- 余談ですが、Excess group delayのプロットは、サブウーファーとメインスピーカーの間に時間オフセットがあることも明確に示しています。サブウーファーは約25ms遅延していますが、これは全体的な群遅延プロットからはそれほど明らかではありません。Excess group deleyは、スピーカーの時間調整に役立つプロットです。
- A common cause of non-minimum phase behaviour in rooms (REW V5.19 Help P.60)
- 最minimum phaseシステムがカスケード接続されている(直列に接続されている)場合、システム全体がminimum phaseのままになります。システムの個々の伝達関数が乗算され、これによりminimum phase特性が保持されます。上記の可逆性に関する段落では、minimum phaseシステムの振幅はどこにもゼロではなく、ゼロ以外の値を乗算してもゼロ値は生成されません。ただし、minimum phaseシステムの応答を追加すると、通常、応答全体でminimum phaseではない結果が得られます。追加するシステムの応答の大きさが等しいが位相が逆である領域がある場合、それらの合計はゼロになります。ここに、部屋の応答の問題があります。これは、測定する部屋の応答が、部屋に放射され、部屋の表面で反射する音によるさまざまな応答の合計であるためです。これは、以下に示すように、最低周波数でも当てはまります。
- Minimum phase and all that (REW V5.19 Help P.66)
- イコライザーの制限のほとんどを今知っています。私たちは物を少し動かし、いくつかの吸収体を使用して、最悪のディップを取り除きました。EQを細心の注意を払って調整した後、周波数応答は実際にはかなりフラットになっています。しかし、それでもひどい音がします。 では、今何が起こっているのでしょうか?
- 次の数段落はもう少し技術的になりますが、それを続ける価値があります。イコライザーは、いくつかの例外を除いて、最小位相デバイスです(一部は線形位相ですが、それは私たちが直面している問題の助けにはなりません)。EQの周波数応答を調整するときは、位相応答も変更します。これは、測定の一部として無視されることがよくあります。フェーズを気にする必要がある理由を調べるために、少しわき道にそれます。
- Why does phase matter? (REW V5.19 Help P.66)
- 測定ソフトウェアは、接続されているシステムの伝達関数を測定します。伝達関数には、おなじみの周波数応答と位相応答の2つの部分があります。システムは同じ周波数応答を持つことができますが、実際には、システムを通過する信号に対してまったく異なる影響を及ぼします。違いは、システムの位相応答にあります。位相差がどれほど大きくなるかを示す簡単な例として、2つの非常に異なる信号(インパルスと周期的ノイズの周期)を測定した結果を考えてみます。これらの信号は両方とも完全にフラットな周波数応答を持っており、周波数応答を見てもそれらを区別することができないです。時間信号は明らかに完全に異なって見えるので、信号が周波数応答を行うためにFFTを通過したとき、その違いはどうなりましたか?それはすべてフェーズ応答にあります。インパルスはすべての周波数でゼロ位相です。周期的なノイズにはランダムな位相があります。周波数応答だけでは信号がどのように見えるかがわからないのと同様に、伝達関数の周波数応答だけではシステムが通過する信号に対して何をするのかがわからないのと同様に、位相応答も調べる必要があります。
- したがって、周波数応答が適切にフラット化されているシステムがまだ正しく聞こえない理由の答えは、位相応答にあります。部屋の応答は、ほとんどの場合、最小フェーズではありません。その技術的な説明は、私たちが直面している問題の理解にはおそらく役立たないでしょうが、結果は次のとおりです。周波数応答(すでに説明した制限内)でほぼ好きなことを行うことができますが、位相応答はEQの範囲を超えています。EQの周波数応答調整で行うことはすべて、位相応答に対応する影響があります。私たちが行う周波数応答調整は、部屋の周波数応答と同じでも反対でもかまいませんが、位相については同じではありません。これは、部屋が最小位相ではないことを意味します。EQでミラーリングできない信号の位相に対して処理を実行しました。周波数応答を修正するが、位相応答は修正しないということは、部屋がそれを手に入れる前のように時報を見せることができないことを意味しますが、EQをいじるのに多くの時間を費やします。限界に達しました。
- SPL and Phase Graph (REW V5.19 Help P.91)
- SPLおよび位相プロット(またはインピーダンス測定の場合はインピーダンスおよび位相)は、測定の周波数(dBまたはオーム)および位相(度)応答を示します。周波数応答には測定名のラベルが付けられ、位相応答は測定色の明るい色合いと右側のプロット軸を使用します。 有効な位相情報を得るには、インパルス応答から時間遅延を取り除く必要があることに注意してください。時間遅延により、周波数とともに増加する位相シフトが発生します。たとえば、わずか1msの遅延では、100Hzでは36度、10kHzでは3,600度の位相シフトが発生します。これは、1msが100Hz信号の10ms周期の1/10であるためです。ただし、10kHz信号の0.1ms周期の10倍であり、各周期は360度です。測定の時間遅延は、インパルスグラフコントロールを使用して時間軸のゼロ位置を変更するか、以下で説明する[Estimate IRDelay]を使用して調整できます。
- 測定された位相に加えて、プロットは、応答の最小位相バージョンを生成した結果として生じる最小および過剰位相プロットを示すことができます。これについては、以下でさらに説明します。 プロットには、測定用のマイク/メーターまたはサウンドカードのキャリブレーションデータも表示されます。 測定パネルの[Change Cal...]を選択すると、校正データを変更または削除できます。
- Minimum Phase/Excess Phase (REW V5.19 Help P.91)
- [Generate Minimum Phase]を使用して応答の最小位相バージョンを生成した場合、最小位相トレースと過剰位相トレースがアクティブになります。 これらは、最小位相応答と、測定された位相と最小位相の差(「過剰」)を示しています。 最小および超過位相と群遅延の詳細については、Minimum Pahse(P.57)を参照してください。
- SPL and Phase Controls (REW V5.19 Help P.92)
- SPLおよびフェーズグラフのコントロールパネルには、次のコントロールがあります。

- 位相トレースは通常、+180/-180度でラップします。 これは、位相が360度の範囲で周期的であるためです(+90は-270と同じ位相です)。しかし、トレースはラップせずに表示できます。これが[Unwrap Phase]コントロールが行うことです。 アンラップされた位相の問題は、正しいゼロ位相がどこにあるかを知ることです。別の問題は、アンラップされた値が非常に大きくなったトレースの部分を表示することです。 ラップされていない位相は、カーソル周波数で-180..180度の範囲内になるように(360度の倍数で)オフセットされます。 [+360]ボタンと[-360]ボタンも、位相トレースを360度ステップでシフトします。
- [Wrap Phase]は、フェーズトレースを、トレースが180度または-180度と交差する垂直線のある従来のラップビューに戻します。
- [Generate Minimum Phase]は、現在のIRウィンドウ設定を使用して測定のminimum phase versionを生成します。次に、minimum phaseトレースは、測定と同じ周波数応答を持つシステムの最小位相シフトを示し、excess phaseトレースは、測定された位相とminimum phaseの差を示します。[Generate Minimum Phase]を使用すると、minimum phase impulseプロットとminimumおよびexcess group delayプロットも生成され、それぞれのグラフで表示できます。
- minimum phase responseは測定の周波数(振幅)応答から導出されるため、IRウィンドウ設定は重要であることに注意してください。これは、IRウィンドウ設定の影響を受けます。 その後、ウィンドウ設定が変更された場合は、[Generate Minimum Phase]を再度使用して、新しい設定を反映する必要があります。 左側のウィンドウ(ピークの前に適用されたウィンドウ)の形状が最小位相結果に影響を与えることにも注意してください。長方形のウィンドウは、たとえばハニングウィンドウよりも位相シフトが小さい応答を生成します。
- 測定対象のシステムが本質的に最小位相であった場合(たとえば、ほとんどのクロスオーバーがそうであるように)、最小位相応答は、測定から時間遅延を取り除くことと同じです。 部屋の測定値は、主に低周波数での一部の地域を除いて、通常は最小位相ではありません。 最小およびexcess phaseとgroup delayの詳細については、Minimum Pahse(P.57)を参照してください。
- [Estimate IR Delay]は、最小位相バージョンと比較することにより、測定の時間遅延の推定値を計算します。 計算された遅延は、遅延が計算された後に表示されるパネルの[Shift IR]ボタンを押すことにより、インパルス応答から削除できます。 インパルス応答をシフトすると、プロットが無効になるため、生成されたスペクトログラムがクリアされることに注意してください。
- [Generate Minimum Phase]および[Estimate IR Delay定]コントロールは、インパルスグラフコントロールパネルにも表示されます。
- トレースオフセット値はグラフの位置を移動しますが、データを変更しないため、凡例の値は変更されません。 [Add offset to data ]ボタンを押すと、現在のオフセット値が測定データに転送され、それに応じて凡例の読み取り値が更新されます。
- [Show points when zoomed in]が選択されている場合、SPLと位相応答を構成する個々のポイントは、ズームレベルが区別できるほど高い場合にグラフに表示されます(プロットの一部のみである可能性があります)。
- [Show modal frequencies]が選択されている場合、EQウィンドウの[Modal Analysis]セクションに入力された部屋の寸法の理論的なモーダル周波数がグラフの下部にプロットされます。
- Impulse Responce Calcuation (REW V5.19 Help P.213)
- タイミング基準の選択は、REWがサウンドカードのループバックをタイミング基準として使用するか、音響タイミング基準として使用するか、または基準なしで使用するかを選択します。タイミング基準を使用すると、REWはコンピューターとサウンドカード内の可変伝搬遅延を排除して、別々の測定値が同じ絶対タイミングを持つようにすることができます。ループバックが選択されている場合、基準チャネル信号はサウンドカードの出力から入力にループバックする必要があり、測定値はループバックタイミングに関連します。通常、これは、測定値が、測定されるスピーカからマイクまで音が伝わるのにかかる時間に対応する時間遅延を持つことを意味します。 音響タイミング基準が使用される場合、REWは、測定対象のチャネルで測定スイープを生成する前に、基準として機能するように選択された出力にタイミング信号を生成します。タイミング信号は正確なタイミングを可能にする高周波掃引であり、サブウーファーを基準チャンネルとして使用することはできません。測定には、基準スピーカーの距離と比較したマイクからの距離の差に対応する時間遅延があります。基準スピーカーがさらに離れている場合、遅延は負になります。アコースティックタイミングリファレンスを使用する場合、複数のスイープは使用できないことに注意してください。 タイミング基準が使用されていない場合、REWはSet t=0 at IR peakの設定に従ってIRゼロ時間を設定します。
- タイミング基準を使用する場合、REWは測定対象のシステムの遅延を計算し、測定情報パネルにミリ秒単位の「システム遅延」として表示できます。同等の距離はフィートとメートルで括弧内に示されます。サブウーファー応答の帯域幅が制限されているため、遅延値はサブウーファー測定では正確ではないことに注意してください。遅延推定はインパルス応答のピークの位置に基づいており、サブウーファーには広いピークと遅延応答があります。
- Set t=0 at IR peakは、REWがインパルス応答のゼロ時間をピークの位置に対応するように設定するかどうかを制御します。これが設定されていない場合、REWはインパルス応答の時間遅延を推定し、それを削除して、それに応じてt=0時間を設定します。
- Sub-sample timing adjustment
- サブサンプルタイミング調整の選択は、IRピークでt = 0を設定するとき、またはタイミング基準として他のチャネルを使用するときに、REWがインパルス応答タイミングを単一サンプル未満の解像度に調整するかどうかを制御します。サブサンプルのタイミング調整では、調整を実行するためにインパルス応答のリサンプリングが必要です。これにより、測定のノイズフロアがわずかに上昇しますが、この増加は、通常の音響測定のノイズフロアをはるかに下回ります。そして、サブサンプル調整は、高周波でより正確な位相情報を提供します。
- Decimate IR
- Decimate IRの選択は、REWが測定の周波数範囲に対応するようにインパルス応答のサンプルレートを下げるかどうかを制御します。このオプションを選択すると、低周波測定のインパルス応答サイズが大幅に減少し、データの処理が高速化されます。
- インパルス応答がインポートされると、t = 0の位置は、インポートされたデータの最初のサンプルまたはインパルス応答のピークの位置のいずれかに設定できます。
- REWは測定を行った後、導出されたインパルス応答を切り捨てて、測定ファイルに必要なストレージを最小限に抑えながら、重要な情報を保持できます。ピークの前に1秒の期間が保持され、デフォルトではピークの後に1.7秒の期間が保持されます(これはサンプルレートによって少し異なります。44.1k(または倍数)では約2秒、48kでは1.7秒です。 )。場合によっては、非常に長いインパルス応答を持つ非常に大きなスペースでの測定など、より多くのインパルス応答を保持すると便利な場合があります。REWには、約4.4秒または9.9秒後に応答を切り捨てるか、インパルス応答全体を保持するオプションがあります。より長いスイープを使用する必要がある場合もあります(256kスイープでは、ピーク後に約6秒のインパルス応答データが利用可能です)。特に長い測定スイープが使用されている場合、インパルス応答全体を保持すると、はるかに大きな測定ファイルが生成されることに注意してください。応答全体が保持される場合、ピークは応答の中心になります。